¶ EggBot77 2018 - Easterhegg-Edition
¶ Agenda des Workshops
JK: Aufgrund der Trocknungszeiten des Holzleims würde ich folgenden Ablauf vorschlagen (Einrückungen = Mechanik)
- Begrüßung
- Verteilen der Sets
- Verkleben des Gehäuses
- Verkleben der Eierhalter
- Umbau der Shields (Brücken, Treiber)
- Verkleben des Arms
- Montage von Arduino und Shield
- InkScape-Plugin
- Montage der Motoren
- Stecker der Motoren
- Stecker des Servos
- Montage des Arms
- Inbetriebnahme (ohne Ei)
- Montage der Welle
- Montage Moosgummi
- Tests mit Ei
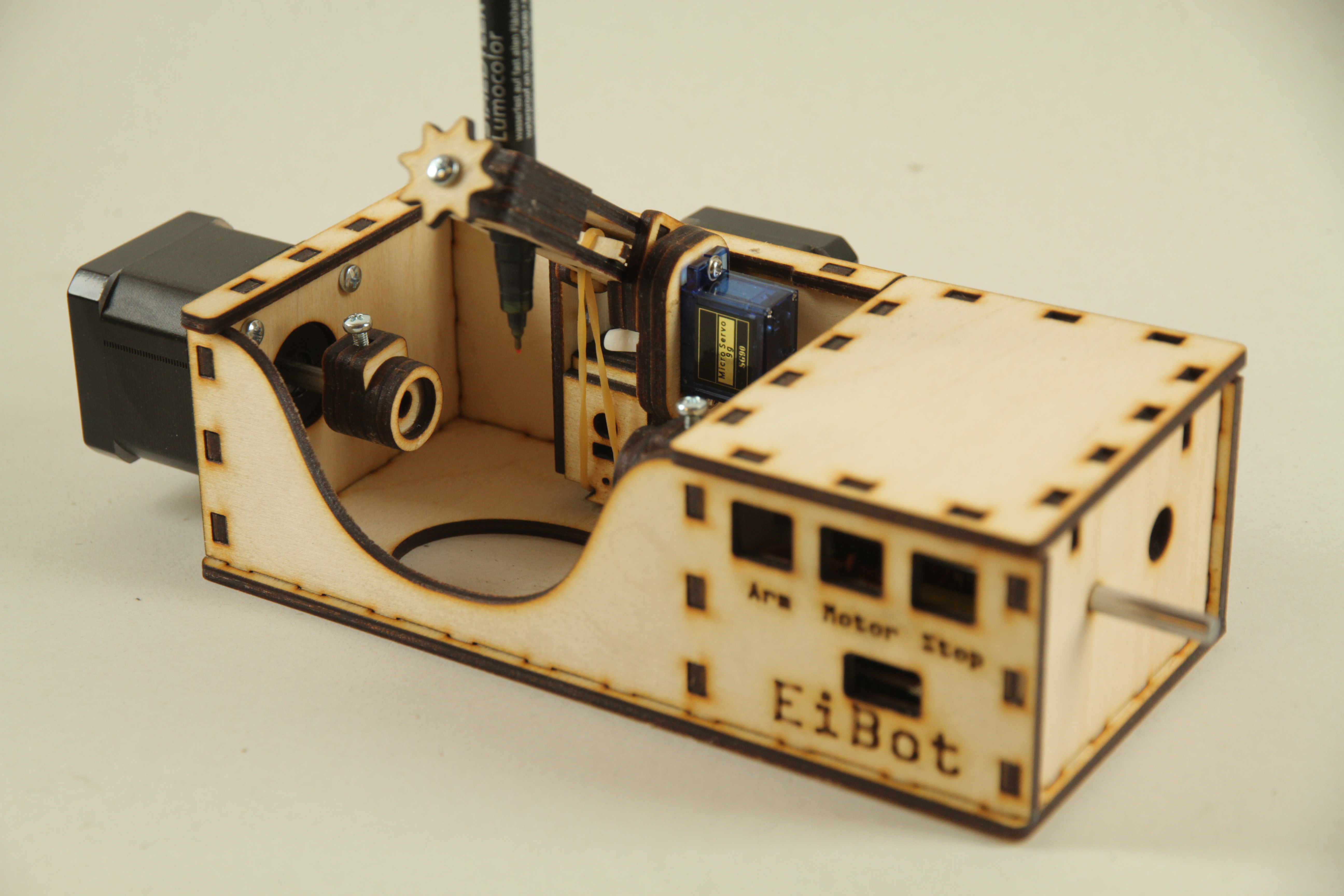
¶ Aufbau Mechanik
siehe https://fablab-wuerzburg.dozuki.com/c/EiBot
¶ Aufbau Elektronik
<note important> Es gibt mehrere Stellen, an denen Ihr Hardware zerstören könnt! Daher ist es sehr wichtig, folgende Hinweise zu beachten:
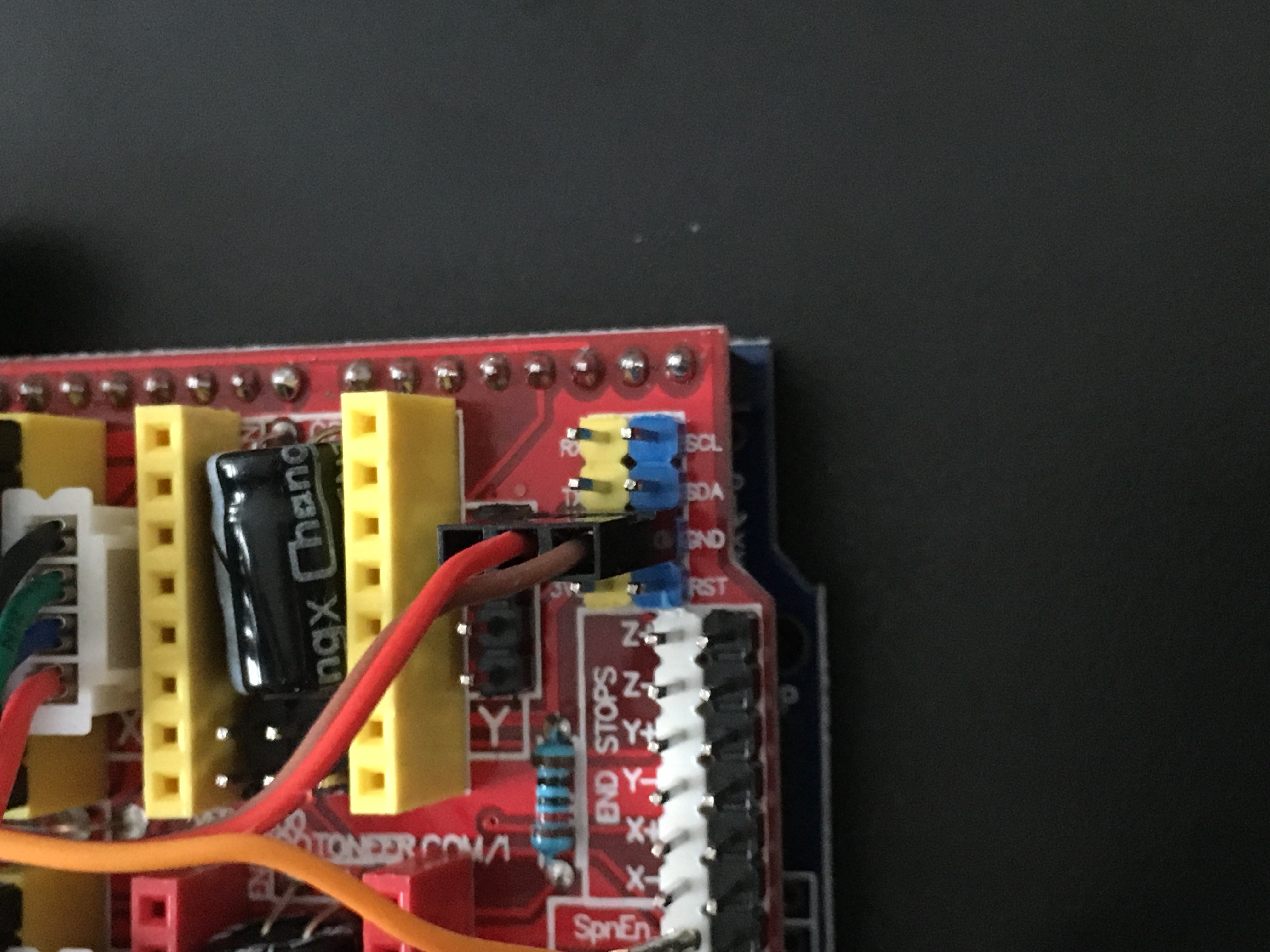
- Einsetzen der Stepper-Treiber immer in der richtigen Richtung - s. Foto
- Trennen der 12 V-Versorgung _nie_ zwischen Netzteil und Shield; immer durch Ziehen des Netzsteckers
- Auf- und Abstecken des Shields _immer_ im stromlosen Zustand (USB- und 12 V-Leitung getrennt)
- An- und Abstecken der Stepper _immer_ im stromlosen Zustand (USB- und 12 V-Leitung getrennt)
Dabei können nicht nur die Stepper-Treiber oder der Arduino, sondern auch der USB-Host (Laptop!) zerstört werden! </note>
¶ Steppermotoren
Jumper für Microstepping 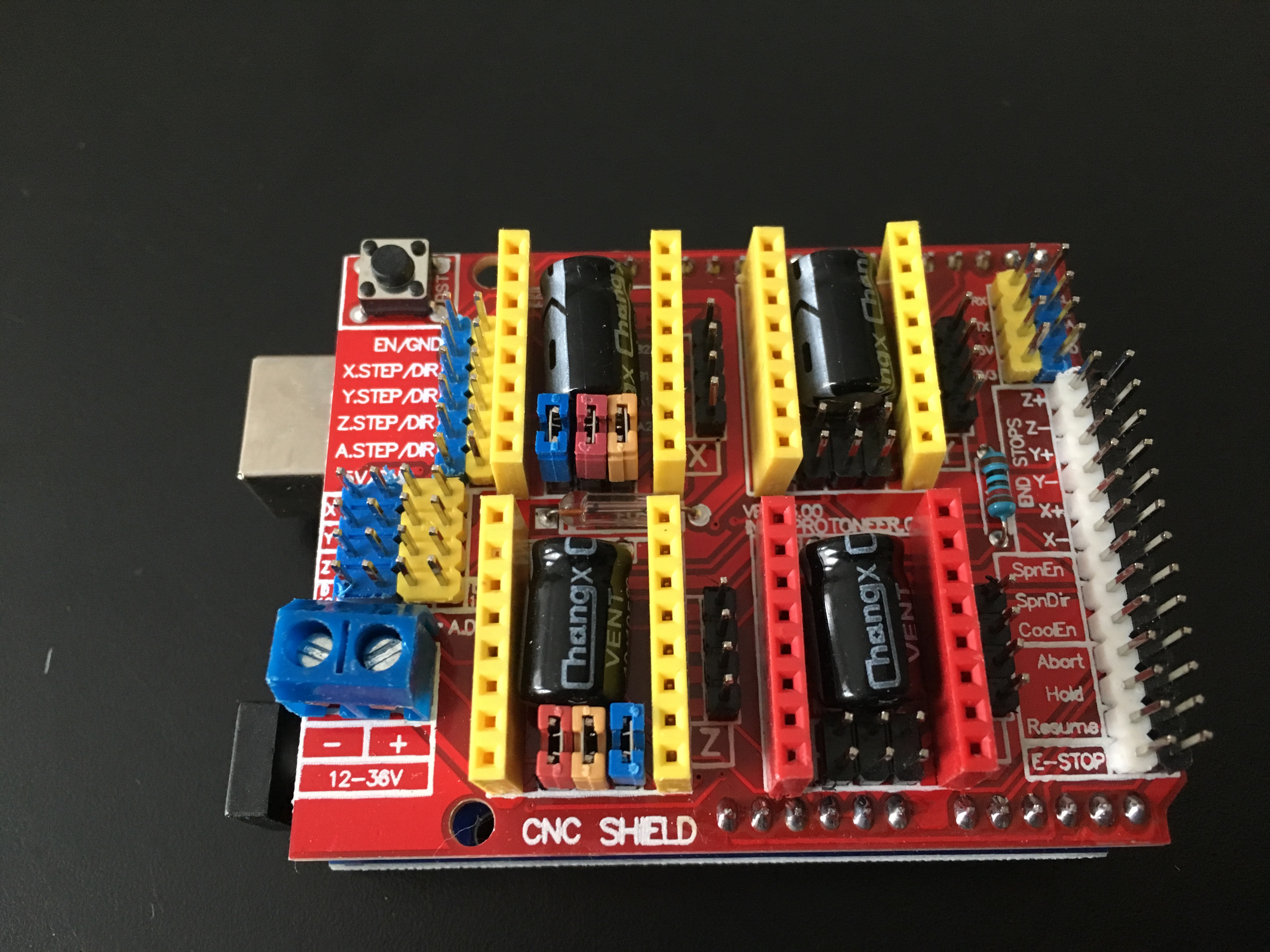
Steppertreiber und Motorkabel 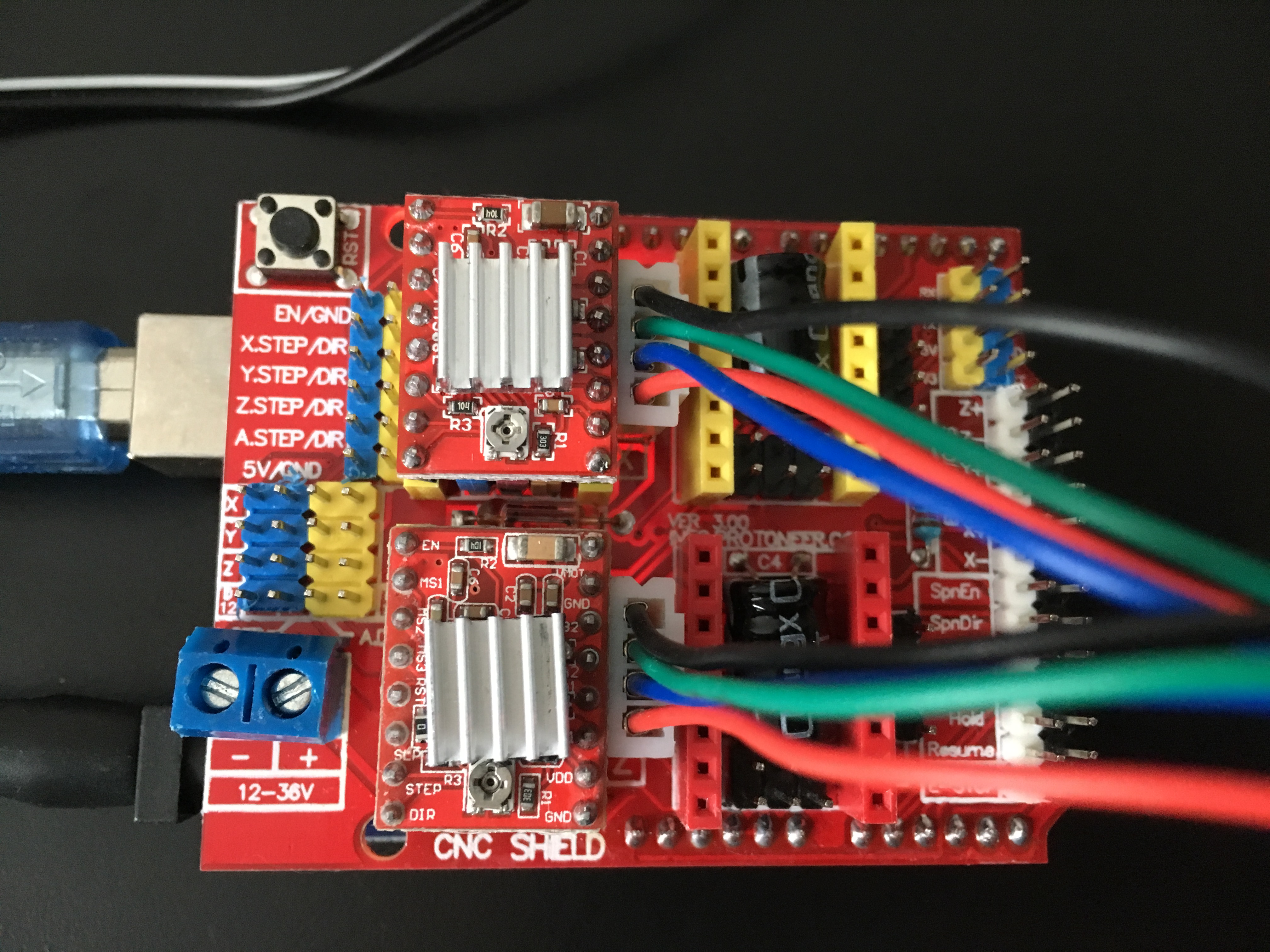 (bitte nicht falschrum einsetzen (magic smoke und so))
(bitte nicht falschrum einsetzen (magic smoke und so))
¶ Stecker auf dem CNC-Shield
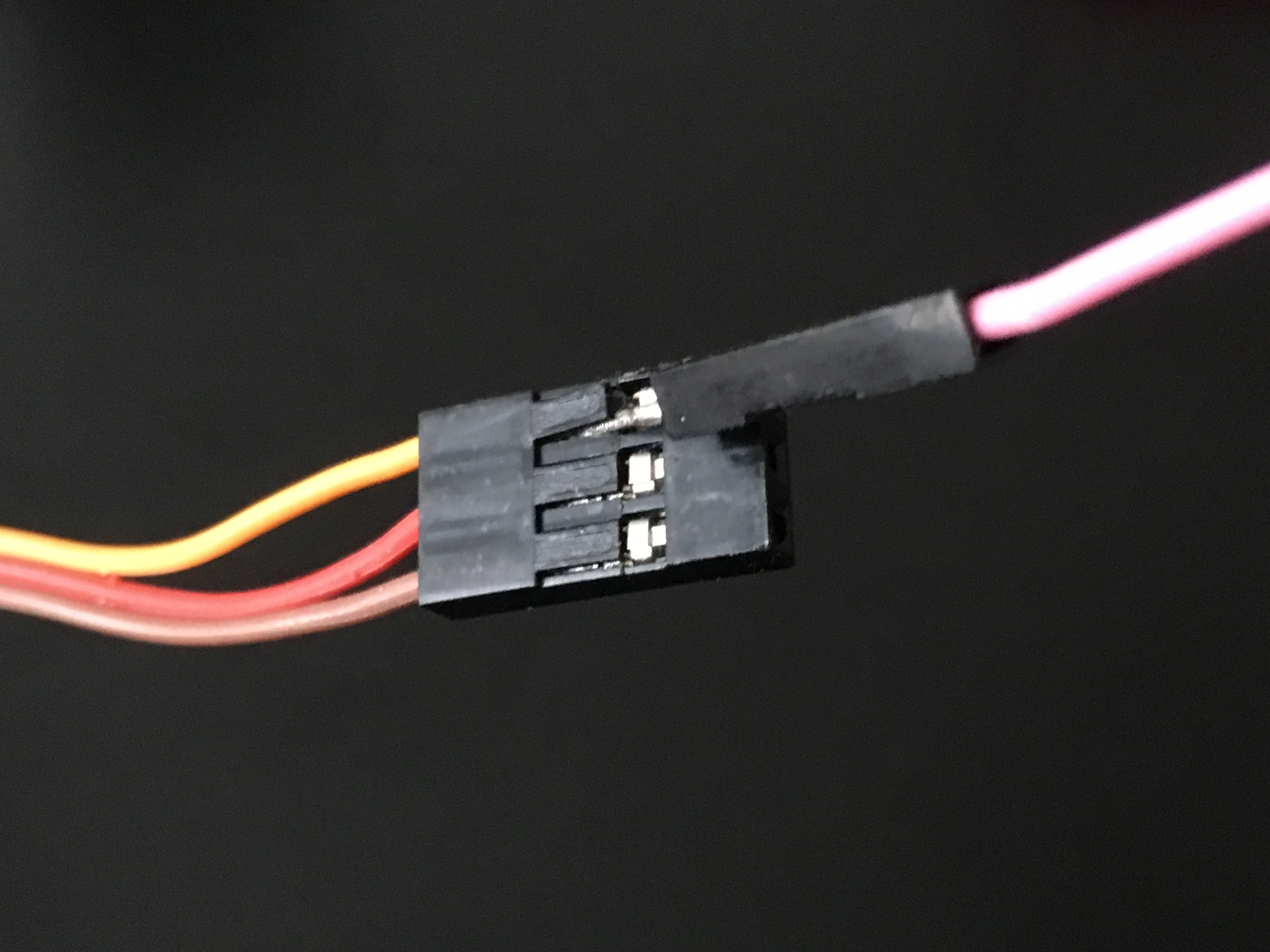
¶ Servo
- Braun - GND
- Rot - 5V
- Gelb/Orange - Spindle enable - D12 (muss herausgelöst werden - s. Foto)
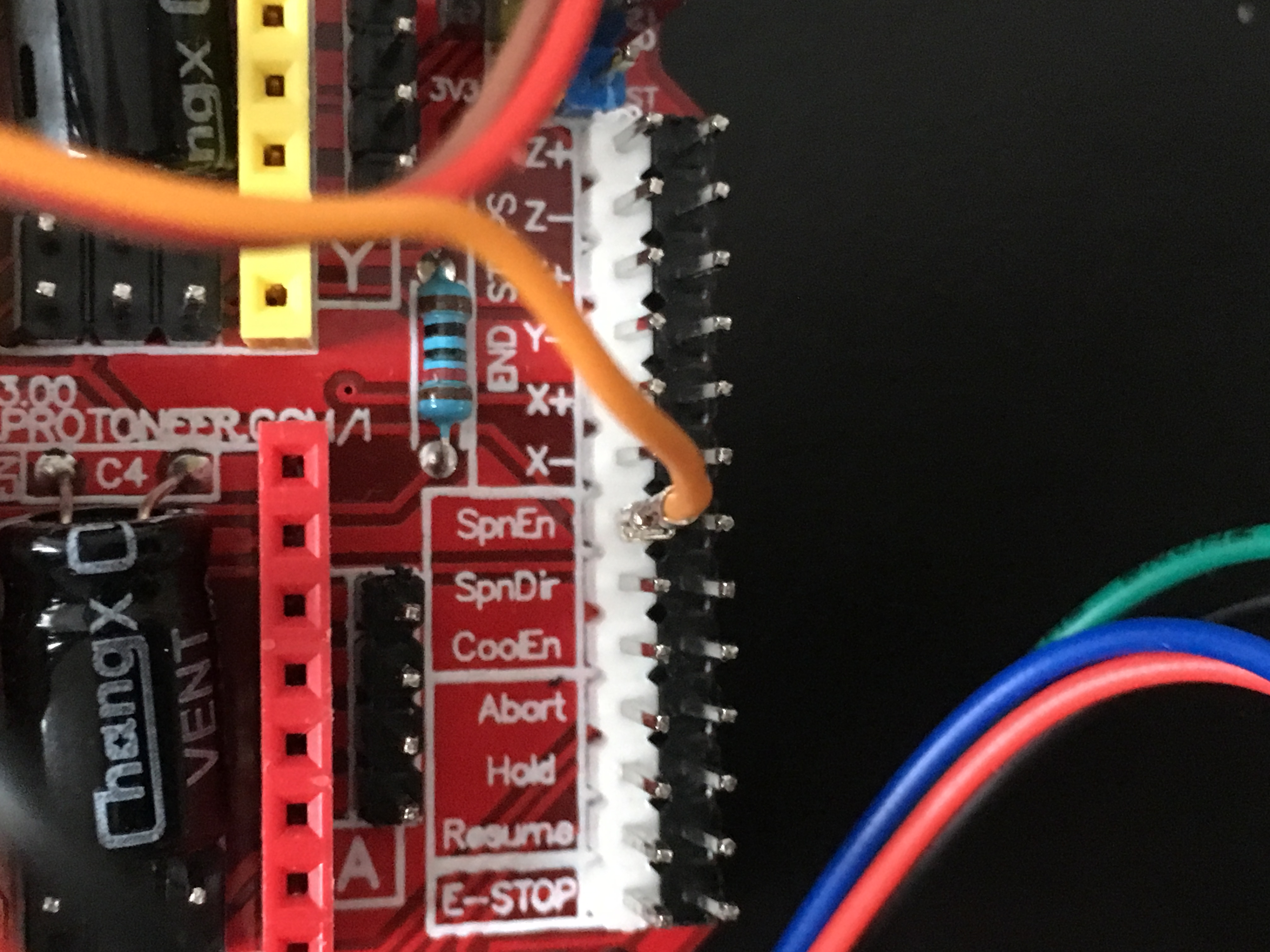
¶ Taster
- Enden abisolieren und verzinnen
- Enden an den Tastern anlöten
- jeweils das eine Ende auf den weißen Stift (An) und das andere Ende auf den schwarzen (GND)
- Arm (grün) - resume (=A1)
- Motor (gelb) - hold (=A2)
- Stop (rot) - abort (=A0)
¶ Software
¶ Inkscape + EggBot-Extension
- Repository https://github.com/justinotherguy/eggbot_extension
- Dort ist in der README beschrieben wie auf verschiedenen Plattformen installiert wird.
¶ benötigte Pakete installieren (linux)
sudo apt-get install inkscape python python-serial
Extension installieren (linux)
curl -L https://github.com/justinotherguy/eggbot_extension/archive/1.2.tar.gz | tar -xz
mkdir -p ~/.config/inkscape
cp -r eggbot_extension-1.2/templates ~/.config/inkscape
cp -r eggbot_extension-1.2/extensions ~/.config/inkscape
¶ Neue Zeichnung selbst erstellen
MenÜ : File-> open from template :
“EggBot” auswählen
danach gewünschten Inhalt zeichnen
¶ Beispielzeichnung öffnen
Menü : Extensions → EggBot Contributes → ......
¶ Zeichnung drucken / Eggbot Einstellungen
Menü : Extensions → EggBot → EggBot Control
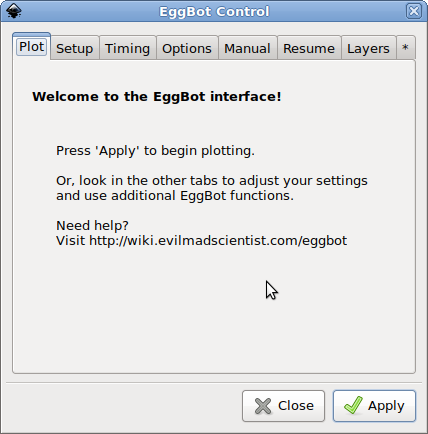
¶ Einstellungen
* Setup:
* Pen up position: 35% (dieser und der nächste Wert hängt vom verwendeten Stifttyp und von der Mittelstellung des Servo ab)
* Pen down position: 50%
* Timing:
* Speed when pen is down: 300
* Speed when pen is up: 400
* Pen raising speed: 50
* Delay after raising pen: 200
* Pen lowering speed: 20
* Delay after lowering pen: 400
* Optionen:
* Reverse motion of Motor 1 (pen)
* Reverse motion of Motor 2 (egg)
* Egg (x) axis wraps around
* Start with pen centered
* Return home when done
* nicht: Enable graver, if attached
* Curve smoothing: 0,2
¶ Firmware EggDuino auf den Arduino flashen
<note information>
- Der Arduino ist bereits von uns mit der richtigen EggDuino-Firmware geflasht, die hier aufgeführten Schritte müssen also nicht ausgeführt werden, sondern dienen der Dokumentation.
</note>
- Repository : https://github.com/justinotherguy/EggDuino.git
- Die Pinbelegung der Boards wird in der Datei
config.hangepasst, s. https://github.com/justinotherguy/EggDuino/blob/eh2018-CNC-Shield-for-Uno/config.h
¶ Anschluss Versorgungsspannung (12V)
- Hohlstecker abknipsen
- Aderendhülsen anbringen
- Versorgung direkt auf CNC-Shield anschliessen ("+/- 12-36V", blaue Doppelschraubklemme)
¶ Vorgehensweise mit PlatformIO:
Eggduino-Firmware laden
git clone https://github.com/justinotherguy/EggDuino.git
cd Eggduino
git checkout eh2018-CNC-Shield-for-Uno
platformIO installieren
pip install platformio
Arduino flashen
platformio run -t upload -e uno
troubeshooting, serielle devices anzeigen
platformio device list # serielle devices anzeigen
apt-get install python pip # benötigte pakete
- Die Sourcen werden am einfachsten mit PlatformIO kompiliert und auf die Arduino Boards übertragen. Alternativ kann auch die klassische Arduino IDE benutzt werden.
¶ Vorgehen mit Arduino-IDE:
* Download [[http://arduino.cc/|Arduino]]
* git clone https://github.com/section77/EggDuino.git
* cp -R EggDuino/lib/VarSpeedServo ~/Documents/Arduino/libraries/ (macOS - Zielpfad weicht unter Linux ab)
* Arduino per USB an den Rechner anschließen
* Tools -> Board: "Arduino Uno"
* Tools -> Port: "/dev/cu.wchusbserial1410" (o.ä. unter macOS); "/dev/ttyACMO" (o.ä. unter Linux)
* "Upload"
¶ FAQ / Tipps zur Fehlersuche
¶ "Failed to connect to EggBot"
- hat der Benutzer Berechtigung für das Device? Bsp.:
<!-- -->
$ ls -al /dev/tty.usbmodem1421
crw-rw---- 1 root wheel 21, 92 30 Mär 20:31 /dev/tty.usbmodem1421
-> Benutzer muss in Gruppe wheel sein; falls das nicht so ist: Gruppe für das Device auf eine Gruppe ändern, in der der Benutzer ist
¶ Arduino
- Test: lässt sich blink.ino flashen?
¶ Einer oder beide Stepper drehen in die falsche Richtung?
- mehrere Möglichkeiten:
- die Einfachste: den Stecker des Steppers umdrehen (Obacht! Vorher 12 V-Versorgung und USB-Kabel ausstecken)
- in der EggBot-Extension unter Optionen das Häkchen bei "Reverse motion of Motor" für den entsprechenden Motor entfernen oder setzen
¶ Bekannte Probleme
- Der Stift wird zu Beginn jeder Zeichnung ein Mal kurz aufgesetzt
- Lösungen:
- Unterbrechen der Reset-Leiterbahn auf dem Arduino-Board (welche, wie?)
- Kondensator einsetzen (wo, wie?)
- in Software (wie?)
- Lösungen:
¶ Zutaten
- Stepper (2x)
- NEMA 17
- Achslänge: 20mm
- Achsdurchmesser: 5mm, abgeflacht
- Tiefe der 4 Befestigungsbohrungen: mind. 4,5mm
- Schrittwinkel: 1,8° (200 Schritte/Umdrehung)
- Stecker an der Zuleitung
- nice to have: gesteckte Zuleitung auch auf Motorseite
- https://www.amazon.de/gp/product/B06XX8ZN99/ref=ox_sc_act_title_2?smid=A2SQFOMF8GF1UL&psc=1
- Servo
- Arduino Uno CNC-Shield (inkl. 4x Stepper-Treiber, Kühlkörper)
- https://www.ebay.de/itm/CNC-V3-Shield-UNO-R3-A4988-Driver-Modul-Heatsink-fur-Arduino-3D-Drucker-TE623/162833531755
- https://www.ebay.de/itm/UNO-CNC-expansions-shield-A4988-DRV8825-Arduino-kompatibel-inkl-Jumper-315/321940978053
- https://www.ebay.de/itm/CNC-Shield-V4-Expansion-Board-Nano-3-0-Stepper-A4988-Driver-fur-Arduino-TE732/162480174217
- Jumper (werden wohl beim Arduino-Shield nicht mitgeliefert; pro Board werden 6 Stück benötigt (je 3 für X und für Y)
- https://www.pollin.de/p/codierbruecken-jumper-450222
- 20 Boards a 6 Jumper -> 120 Jumper -> 12 Sets a 10 Jumper
- Netzteil 12V mit mind. 500 mA; Hohlstecker 5,5mm/2,1mm; +-Pol innen
- 3 Taster
- Verbindungsleitungen zum Anschluss der Taster (3x insgesamt: 40 Adern -> 13 Sätze a 6 Stücke)
- 2x 20mm Moosgummi (OBI Rutschstopper selbstklebend extra soft, enthält 8 runde Moosgummi-Stücke, die perfekt auf die Cups passen)
- Stifte:
- https://www.ebay.de/itm/272231819580 (nicht selbst getestet)
- Saugnäpfe: http://www.1a-saugnapf.com
¶ Ergebnisse




